

Willkommen auf meiner neuen Website. Hier wird in Kürze eine neue Plattform entstehen, auf der ich mich selbst sowie Teile meiner Arbeit und Interessengebiete präsentieren werde!
WT32-ETH01 mit Arduino





USB IDs API
Musikstadt Trossingen – Musik ist Heimat
Dieses tolle Video von Tzu-Hsuan Chuang ist ein Ortsporträt über meine Heimatstadt Trossingen und das umfangreiche Musikleben das hier geboten wird.
Auch mich hat die musikalische Vielfalt der Stadt schon von klein auf begleitet. Durch die musikalische Früherziehung, das Erlernen des Trossinger Heimatinstruments, der Mundharmonika, während der Grundschule, sowie den Musikunterricht auf dem Schlagzeug und der Zugposaune an der Musikschule habe ich Leidenschaften entwickelt, die ich bis heute in vielen musikalischen Projekten, besonders in Orchestern und Bands zum Ausdruck bringen kann.
Durch das gemeinsame Musizieren hat sich mein Weg mit unzähligen wundervollen Menschen gekreuzt und nicht zuletzt hat das musikalische Vereinsleben mir das Gefühl von Heimat gegeben.
So spiegelt dieses Video nicht nur die musikalische Vielfalt in Trossingen wieder, sondern auch meine persönliche Entwicklung und Lebensgeschichte.
Musik ist Heimat – Trossingen ist meine Heimat.
#weihnachtenzuhause
Das Orchester Hohnerklang sagt mit seinem Videoprojekt #weihnachtenzuhause DANKE, an alle Freunde, Gönner, Fans und Sponsoren, die den Verein in diesem herausfordernden Jahr unterstützt haben!
Frohe Weihnachten, einen guten Rutsch ins Neue Jahr 2021 und viel Spaß mit unserer Fassung von „Es ist ein Ros‘ entsprungen„!
Eure Spieler vom Orchester Hohnerklang – Trossingen
Hinweis:
Das Video wird von YouTube eingebettet. Es gelten die Datenschutzbestimmungen von Google.
Übersicht 3D-Druck-Filament
Die Materialien für den 3D-Druck sind vielseitig und haben unterschiedliche Eigenschaften. In der folgenden Tabelle ist eine Übersicht der verschiedenen Filamente:
| Material | Spezielle Eigenschaften | Verwendungszweck | Preis | Drucktemperatur | Druckbett notwendig | Schwierigkeit Verarbeitung |
|---|---|---|---|---|---|---|
| ABS (Acrylnitril-Butadien-Styrol) | • Stark • Günstig | • Spielzeug • Nutzobjekte | € | 220 – 260 °C | Ja |  |
| ASA (Acrylester-Styrol-Acrylnitril) | • Outdoorgeeignet • UV-resistent | • Außenbereich | € | 230 – 260 °C | Ja | |
| Green-TEC | • Ökologisch abbaubar • Stark | • Prototypen • Modelle | €€ | 170 – 230 °C | optional |  |
| HIPS (High Impact Polystyrene) | • Schlagzäh • Löslich in Limonen | • Nutzobjekte • Stützmaterial | €€ | 220 – 230 °C | ja | |
| Nylon | • Extrem widerstandsfähig | • Abriebfeste Werkzeuge • Funktionsmodelle | €€€ | 230 – 270 °C | ja |  |
| PC (Policarbonat) | • Extrem steif | • Mechanische Bauteile mit hoher Steifigkeit | €€€ | 250 – 310 °C | ja | |
| PETG (Polyethylenterephthalat) | • Standard-Filament • Lebensmittelecht | • Mechanische Bauteile | € | 190 – 230 °C | ja | |
| PMMA (Polymethylmethacrylat) | • Glasalternative | • Acrylglas • Spielzeug • Prototypen | €€ | 230 – 260 °C | ja | |
| PLA (Polyactide) | • Standard-Filament | • Prototypen • Modelle | € | 190 – 210 °C | optional | |
| PP (Polypropylen) | • Leicht • Lebensmittelecht | • Haushaltsgeräte | €€ | 200 – 240 °C | ja | |
| PVA (Polyvinylalkohol) | • Wasserlöslich | • Stützmaterial | €€€ | 180 – 210 °C | ja | |
| TPU/TPE (Thermoplastisches Polyurethan/ Thermoplastische Elastomere) | • Elastisch | • Flexibles Spielzeug • Flexibles Gehäuse | €€ | 190 – 245 °C | optional | |
C auf einen Blick
#wirhaltenzusammen
Nun ist es fertig – das Orchester Hohnerklang präsentiert das von Hans-Günther Kölz neu komponierte Stück: #wirhaltenzusammen.
Das Orchester aus Trossingen hat das aktive Musizieren in der Zeit der Corona-Krise weiter betrieben und dadurch den Kontakt zueinander nicht verloren. Nur halt einmal auf andere Weise, nämlich im Over-Dub-Verfahren. Jeder Spieler und jede Spielerin, darunter auch ich, hat sich mit einem Timecode zuhause gefilmt und aufgenommen. Daraus haben wir ein Gesamtwerk produziert.
Viel Spaß damit!
Hinweis:
Das Video wird von YouTube eingebettet. Es gelten die Datenschutzbestimmungen von Google.
Stargate: The Last Stand
Stargate: The Last Stand ist eine kostenlose Modification für Half-Life2 von InterWave Studios. Die Modifikation ist ein Online Multiplayer-Game, das auf den Fernsehserien: Stargate – Kommando SG-1, Stargate Atlantis und Stargate Universe basiert. Der Spieler wählt zwischen den beiden Teams: Goa’uld und Tau’ri und muss seine Missionen erfüllen oder das andere Team im Deathmatch bekämpfen.
Hinweis:
Das Video wird von YouTube eingebettet. Es gelten die Datenschutzbestimmungen von Google.
A²C-Protokoll
Das A²C-Protokoll (advanced Arduino communication protocol) wurde 2016 von mir entwickelt und wurde ursprünglich zur einheitlichen Kommunikation zwischen einem Arduino und einem Computer über die serielle USB-Schnittstelle entworfen. Es lässt sich jedoch ebenso auf eine Kommunikation zwischen anderen Gerätekombinationen (z. Bsp. Arduino zu Arduino oder Arduino zu Smartphone über Bluetooth) anwenden.
Der Name des Protokolls ist eine Anspielung auf den seriellen Datenbus I²C und auf die englische Sprechweise „a to c protocol“ für „Arduino to computer protocol“.
Das Grundkonzept des A²C-Protokolls basiert auf der Extensible Markup Language (XML), hat aber keinen Start- und Endtag, sondern nur einen umschließenden Tag, der den Befehl und alle Daten enthält.
Das Protokoll muss für eine eindeutig definierte Kommunikation unter Umständen mit weiteren Kommunikationsrichtlinien erweitert werden. Zum Beispiel müssen für eine Kommunikation über die UART-Schnittstelle, für die das Protokoll ursprünglich vorgesehen war, die Baudrate, die Anzahl der Datenbits, die Paritätskontrolle und die Anzahl der Stopp-Bits zwischen beiden Geräten identisch konfiguriert sein.
Das Protokoll findet bereits Anwendung in den Arduino-basierenden Produkten:
- SunTracker (SIA 2016/2017 der Staatlichen Feintechnikschule mit Technischem Gymnasium Schwenningen )
- Digitale Dual-Lötstation (Berufsausbildung Continental Automotive GmbH Villingen)
- Line-Follower „Herbie“ (WS 2018/2019 Hochschule Furtwangen)
- WG-Konsole (WS 2018/2019 Hochschule Furtwangen)
Die größte Verbreitung hat das A²C-Protokoll im Zusammenhang mit der PC-Software Arduino-Communication™ gefunden. Dieses ermöglicht es Arduino-Programmierern eine schnelle und einfache Kommunikation für eine Steuerung oder Debugging-Zwecke aufzubauen. Des Weiteren können ein Interface eingerichtet und beliebige Tastenkombinationen hinterlegt werden, die sich als Projektdatei speichern und somit auch für andere Nutzer zur Steuerung veröffentlichen lassen.
Das A²C-Protokoll ist unter der MIT-Lizenz lizenziert.
Einführung in das Arduino Entwicklungsboard
In 15 Minuten zum ersten Programm
Finde einen einfachen und schnellen Einstieg ohne Vorkenntnisse in die Welt der Mikrocontroller. Lerne die Entwicklungsplattform Arduino kennen und schreibe in 15 Minuten dein erstes Programm, um eine LED zum Blinken zu bringen.
Los geht’s!
Vorwort
Arduino ist eine aus Soft- und Hardware bestehende Physical-Computing-Plattform. Beide Komponenten sind im Sinne von Open Source quelloffen. Die Hardware besteht aus einem einfachen E/A-Board mit einem Mikrocontroller, der über analoge und digitalen Ein- und Ausgängen verfügt. Die Entwicklungsumgebung basiert auf Processing und soll auch technisch weniger Versierten den Zugang zur Programmierung und zu Mikrocontrollern erleichtern. Die Programmierung selbst erfolgt in einer C bzw. C++-ähnlichen Programmiersprache, wobei technische Details wie Header-Dateien vor den Anwendern weitgehend verborgen werden und umfangreiche Bibliotheken und Beispiele die Programmierung vereinfachen. Arduino kann verwendet werden, um eigenständige interaktive Objekte zu steuern oder um mit Softwareanwendungen auf Computern zu interagieren.
Wikipedia
Software-Installation
Arduino IDE
Zunächst wird die Programmier-Entwicklungsumgebung (Arduino IDE) installiert. Das Programm kann von der offiziellen Webseite unter https://www.arduino.cc/en/main/software als Windows Installer heruntergeladen werden.
USB-Treiber
Zur Kommunikation mit der Hardware eines Arduino-Clones ist ein weiterer USB-Treiber notwendig. Dieser kann unter https://cloud.sebastianlang.net/index.php/s/qXMKkbAWgLfzw69
als Zip-Archiv heruntergeladen werden. Nach dem Entpacken des Archivs wird die Datei setup.exe ausgeführt.
Hardware verbinden
Nach der Installation der Software wird das Arduino-Board kinderleicht über ein USB-Kabel mit dem Computer verbunden.
Eigenes Programm
Mit dem ersten eigenen Programm wird eine LED auf dem Arduino-Board zum Blinken gebracht. Dazu wird zunächst die Arduino IDE auf dem Computer gestartet und ein neuer Sketch (Mikrocontroller-Programm) über das Menü unter Datei → Neu geöffnet. Anschließend wird folgender Code in den Editor geschrieben:
//Methode "setup" wird ein Mal beim Programmstart ausgeführt
void setup() {
//Anschluss des LED-Pins wird als Ausgang initialisiert
pinMode(LED_BUILTIN, OUTPUT);
}
//Methode "loop" wird nach "setup" in einer Dauerschleife ausgeführt
void loop() {
//High-Pegel (5 V) am Anschluss des LED-Pins anlegen (LED anschalten)
digitalWrite(LED_BUILTIN, HIGH);
//Eine Sekunde (1000 Millisekunden) warten
delay(1000);
//Low-Pegel (0 V) am Anschluss des LED-Pins anlegen (LED ausschalten)
digitalWrite(LED_BUILTIN, LOW);
//Eine Sekunde (1000 Millisekunden) warten
delay(1000);
}Anschließend wird über das Menü unter Werkzeuge → Board das Arduino-Board ausgewählt, sowie der COM-Port, an den das Entwicklungsboard angeschlossen ist.
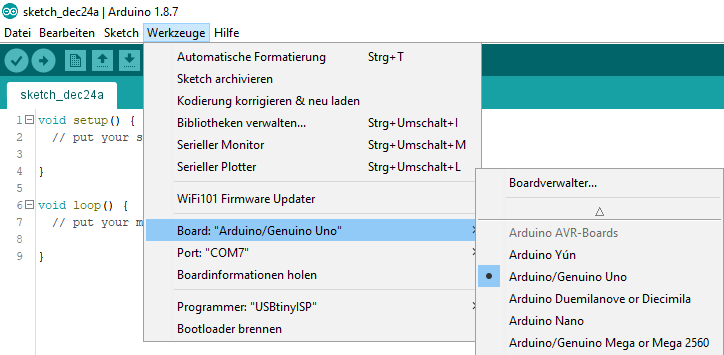
Das Programm wird nun mit einem Kompiler in Maschinencode übersetzt und anschließend auf den Microkontroller des Arduinos übertragen. Dazu wird auf der linken Seite in der Werkzeugleiste auf die Schaltfläche Hochladen geklickt.

Nach dem Übertragen des Programms blinkt die LED auf dem Arduino UNO Board im Sekundentakt.
Weitere Informationen
Technische Details zum Arduino UNO Board sind unter https://store.arduino.cc/arduino-uno-rev3 zu finden.
Eine Übersicht aller Funktionen, Variablen und Strukturen ist unter https://www.arduino.cc/reference/de zu finden.
Viele hilfreiche Beispiele lassen sich in der Arduino IDE unter Datei → Beispiele finden.